 O que significa o Kv dos motores de modelismo?
O que significa o Kv dos motores de modelismo?
O que significa o Kv dos motores de modelismo?
O que significa o Kv dos motores de modelismo?
Em primeiro lugar, disponibilizo uma planilha de cálculo para estudo de motores de imã permanente. Ela contém quatro exemplos trabalhados: motores de escova 540 e 390, mais dois motores brushless tipicamente usados em upgrades dos primeiros. Uma aba de "bônus" também ilustra o motor série (que não é usado em modelismo).
Já esta outra planilha traz uma lista de motores brushless Racerstar para carrinhos de controle remoto, que é minha área principal de interesse. No video abaixo procuro explicar como usar a planilha para escolher um motor:
Os motores utilizados em modelismo são quase sempre de corrente contínua (DC) e imã permanente (PM), sejam motores com escova ou sem escova (brushless). O princípio de funcionamento de qualquer motor elétrico é a reação entre um campo magnético no rotor ("miolo") e outro no estator ("carcaça"). No motor PM, o campo magnético de uma das partes é fornecido por um imã. Outros tipos de motor (indução, série) produzem ambos os campos por meio de eletricidade.
Apesar de motores PMDC serem associados com brinquedos e aplicações de pequena potência, eles não são sinônimos de brinquedo. São os motores mais eficientes, porque o fluxo magnético do imã não consome eletricidade. A evolução da eletrônica e o desenvolvimento de imãs mais fortes abriu campo para o motor PM, e existem unidades com milhares de cavalos de potência.
Porém, o motor PMDC precisa ser aplicado corretamente. Ele tem de ser "casado" em torque e potência com a aplicação, e é ideal quando a exigência é constante. Em aplicações com exigência muito variável, outros tipos de motor atendem melhor e.g. os automóveis Tesla usam motores de indução e locomotivas usam motores série ou de indução.
A principal característica do motor PMDC é ter uma RPM máxima, limitada pelo índice Kv e pela voltagem de alimentação. Um motor de 3600Kv alimentado com 10V não pode passar de 36.000RPM.
Todo motor PMDC pode ser usado como gerador. Se um motor de 3.600Kv for girado a 36.000RPM, gera 10V de tensão. Por outro lado, alimentar o motor com 10V resulta numa RPM um pouco mais baixa, mesmo sem carga, porque sempre existe alguma perda (seja mecânica, elétrica ou magnética).
Esta relação é útil já que o motor PMDC limita sua própria RPM (diferente do motor série que pode se autodestruir sem carga). Além disso, fica fácil controlar a RPM máxima, basta alterar a voltagem de alimentação.
O torque do motor PMDC é linearmente proporcional à corrente que o atravessa. Infelizmente isso significa que a dissipação de calor aumenta quadraticamente: 2x torque = 4x dissipação. Em contraste, o motor série possui torque proporcional ao quadrado da corrente, e a relação entre dissipação e torque é linear.
Como dito antes, um motor PMDC também é um gerador. Isto também vale enquanto ele está funcionando como motor. No exemplo mais acima, o motor de 3.600Kv não passa de 36.000RPM quando alimentado com 10V porque ele está gerando 10V de força contraeletromotriz (FCEM), com sinal contrário da alimentação, e a tensão líquida é zero.
Para que possa circular corrente, a FCEM precisa ser menor que a alimentação, e para isso a RPM precisa ser menor que (Kv × tensão). Se o motor do exemplo girar a 21.600RPM, a FCEM é de 6V. Se alimentado com 10V, a tensão líquida é 4V. Se a resistência interna do motor fosse 0.5 ohms, a corrente seria 4/0.5=8 amperes.
Juntando o Tico (torque proporcional à corrente) e o Teco (FCEM proporcional à RPM) temos que:
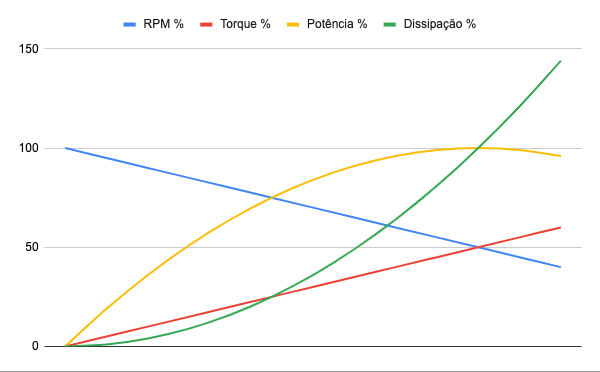
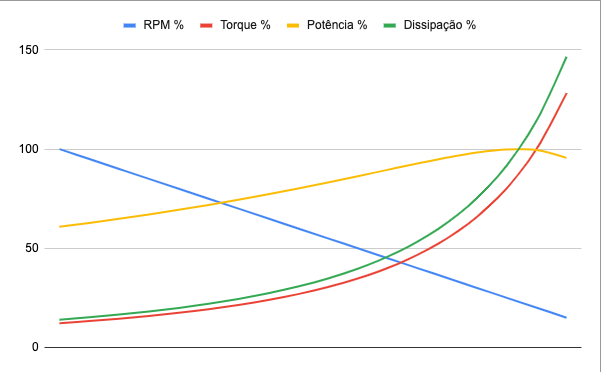
O motor PMDC tem torque elevado de partida, o que é bom porque acelera rapidamente para a RPM de cruzeiro. Porém é fácil sobrecarregar o motor, porque num primeiro momento ele vai dar conta da carga, mas trabalhará com baixa eficiência e pode queimar num segundo momento por aquecimento. A maior potência é obtida na metade da RPM máxima, porém nesta situação a eficiência é 50%. Se o motor produz 100W de potência útil nesta situação, ele dissipa outros 100W, consumindo 200W. Em RPMs menores que 50% da máxima, a dissipação é maior ainda.
Para ser eficiente (e ter durabilidade) o motor PMDC precisa trabalhar "leve" e "frio", com RPM próxima da máxima. Por exemplo, trabalhando a 90% da RPM máxima, o motor é (em teoria) 90% eficiente. Neste ponto de operação o motor produz apenas um décimo do torque de partida, e apenas um terço da potência máxima.
Grosso modo, a potência máxima de um motor PMDC é ditada pelo seu tamanho, por dois motivos:
Ou seja, na melhor das hipóteses a potência de um motor é função do volume, e na pior das hipóteses é função da área da carcaça. Na prática, fica entre uma e outra.
Os motores brushless de modelismo costumam ser caracterizados pelo índice Kv. Como vimos antes, o índice Kv estabelece uma relação entre RPM máxima e voltagem de alimentação. Quais os outros significados deste índice?
Menos comumente aparece o índice Ke, que é o recíproco de Kv, ajustado para rotação angular por segundo. Mas o número Kv é mais "ergonômico"; é mais fácil imaginar um motor Kv=1000 do que um motor Ke=0.0096, embora signifiquem a mesma coisa.
A origem desse índice é a força contraeletromotriz (FCEM). Quando um condutor elétrico (fio ou bobina) está imerso num campo magnético variável, é induzida uma FCEM nesse condutor. A FCEM é proporcional ao número de voltas/espiras da bobina e à força do campo magnético.
No caso de um motor PMDC, seja de escova ou brushless, o campo magnético é fornecido apenas pelo imã. Quanto mais espiras na bobina do estator e/ou mais forte o imã, maior a FCEM e menor o Kv. Usar um imã duas vezes mais forte e triplicar o número de espiras resultaria num motor com Kv seis vezes menor.
Agora, a pergunta de um milhão de dólares: o Kv é relacionado ao torque do motor? Sim! Apesar de tantas fontes afirmarem categoricamente que não, o torque de um motor é inversamente proporcional ao Kv. Um motor de 1000Kv tem torque duas vezes maior que um de 2000Kv, para uma mesma corrente elétrica. Isto não quer dizer que o primeiro motor seja "melhor"; apenas significa que a repartição entre torque e RPM é diferente em cada motor.
Um exercício mental que mostra que Kv não determina a qualidade do motor: um motor de 2000Kv poderia ter engrenagens escondidas no seu interior, de modo a dobrar seu torque. Tal motor, visto como uma caixa-preta, é de 1000 Kv. Obviamente uma redução não melhora a qualidade inerente do motor, embora possa adaptá-lo melhor a um caso de uso.
Cada motor também tem um índice Kt, que expressa o torque em função da corrente. Por exemplo, um motor com Kt de 0.05 produz um torque de 0.15N.m, ou 15N.cm, ou ainda 1500g.cm, quando atravessado por uma corrente de 3A.
Kt é inversamente proporcional a Kv:
Kt = 60
-------
2π.Kv
Kv, Ke e Kt são a mesma coisa, expressa de formas diferentes.
As constantes 2π e 60 adaptam a RPM às unidades SI (Newton, metros e segundos). Um motor com Kv de 3600, comum em automodelismo, tem um torque de 0,00265N.m, mais comumente expresso como 26,5g.cm, por ampere de corrente. Para uma corrente de 30A, seu torque seria de mais ou menos 800 gramas.cm.
O índice Kt não é tão valorizado porque os motores costumam ser alimentados com tensão constante, não com corrente constante. Assim, a corrente é variável e fica a mercê de outras grandezas como RPM e resistência interna do motor. Além disso, o índice Kt não nos diz quanto calor o motor vai dissipar para produzir determinado torque (isso é função do índice Km, visto mais adiante).
Os motores de escova costumam ter um limite de 20000RPM e os brushless em torno de 50000RPM. Se a aplicação corre o risco de extrapolar esses limites, o Kv do motor deve ser escolhido conforme a tensão da bateria.
Por exemplo, um motor de 4500 Kv é adequado para 12V, enquanto um motor de 1200 Kv poderia ser alimentado com até 41V sem ultrapassar o limite de RPM, embora outros limites (corrente, dissipação) ainda devam ser observados.
Além desse limite absoluto, há a questão das eficiências mecânica e magnética. Quanto mais rápido gira o motor, maiores as perdas não-elétricas. Segundo este artigo o motor brushless deve girar a aprox. 60.000RPM divididos pelo número de pólos para maximizar a eficiência. O autor do artigo tem mais experiência com motores "outrunner" (cuja carcaça gira inteira), mas num comentário o autor estima que para motores "inrunner" a base é 100.000RPM, o que significaria 25.000RPM para 4 pólos.
O que define o "tamanho" ou "qualidade" de um motor é a quantidade de cobre que o fabricante empregou nos enrolamentos. (Vou ignorar aqui alternativas mais exóticas como enrolamentos de alumínio ou prata.) Dado um mesmo tamanho e uma mesma quantidade de metal, pode-se fabricar motores com índices Kv muito diferentes, mas sua "qualidade" será praticamente a mesma.
Suponha um motor com 3600Kv. Para transformar esse motor em 1800Kv, preciso "esticar" o fio de cobre a fim de fazer um enrolamento com duas vezes mais espiras. Nesse processo, o fio ficará duas vezes mais fino, portanto a resistência interna do motor será multiplicada por quatro.
Com a resistência quadruplicada, a corrente é dividida por 4, o que dividiria seu torque por 4, mas como o torque específico (Kt) dobrou (pois é inversamente proporcional ao Kv) o torque do motor foi apenas dividido por 2. Sua RPM máxima também cai à metade, o que significa que sua potência máxima foi dividida por 4.
Assim fica parecendo que o motor com Kv menor é "pior", mas o "problema" tem um antídoto simples: basta dobrar a tensão de alimentação. Isto dobra o torque, a RPM e devolve ao motor a potência original.
Desse ponto de vista, o índice Kv anda de mãos dadas com a tensão de alimentação. Escolher o Kv do motor visa meramente adaptar o motor à bateria que pretendemos usar.
Se eu não posso trocar a tensão da bateria, adotar um motor de Kv mais alto rende mais torque e mais potência, devido à resistência interna menor. Talvez por isso muitos modelistas associem Kv maior a potência maior. Porém o incremento de torque via aumento do Kv é de "baixa qualidade"; o motor vai exigir correntes enormes, e dissipar muito calor, para gerar esse torque.
Aumento de potência obtido pelo mero aumento de Kv deve ser acompanhado de um pinhão menor. Isto permite que o motor atinja RPMs maiores, ganhando potência pelo aumento do giro e não pelo aumento de torque.
Como vimos, o índice Kv é insuficiente para descrever um motor. Precisamos saber também qual é a sua resistência interna. Ou então saber o índice Km, também conhecido como "constante de tamanho do motor" que informa a relação entre torque e eficiência. Sua fórmula é:
Km = torque
-------------------------
raiz(potência dissipada)
Um motor perfeito geraria torque sem dissipar nenhum calor, e teria Km infinito, mas isso naturalmente não existe. Manipulando a fórmula, podemos determinar a proporção de Km em relação a Kv e resistência interna:
Km = 60
--------------------------------------
6.28 . Kv . raiz(resistência interna)
A fórmula acima nos diz que, do ponto de vista do índice Km, um motor com Kv alto é "pior", pois exige mais corrente para gerar o mesmo torque. Porém, isto não quer dizer que Kv maior é realmente ruim, já que Km leva em conta apenas o torque, não a RPM nem a potência.
O índice Km guarda relação com a quantidade de cobre empregada nos enrolamentos. Se modificarmos o Kv de um motor mas sem alterar a quantidade de cobre, o índice Km não muda. Basta desenvolver aquele mesmo raciocínio de antes: se Kv cai à metade, a resistência quadruplica, e uma coisa compensa a outra na fórmula.
O índice Km tende a privilegiar motores "maiores", o que pode ser demonstrado pelo seguinte raciocínio. Suponha que pegamos dois motores de 3600 Kv e conectamos eletricamente em paralelo, e com os eixos acoplados. O Kv do conjunto continua sendo 3600, porém a resistência interna cai à metade, melhorando o índice Km em 41%. Por outro lado, se conectamos esses dois motores eletricamente em série, ainda com os eixos acoplados, a resistência interna dobra, porém o Kv cai à metade. Novamente o índice Km melhora 41%.
Mantidos iguais os demais parâmetros, o Kv do motor é inversamente proporcional ao número de espiras.
Antes dos motores brushless, o costume do modelismo era caracterizar os motores pelo número de espiras, porque praticamente todo mundo usava o mesmo tipo de motor: 540 de escova. O Mabuchi RS-540 tem 27 espiras. Este é considerado o "padrão". Motores com mais espiras (raros) são utilizados em aplicações de alto torque, enquanto os motores de menos espiras são considerados mais "quentes". Também costumam ser mais bem construídos, afinal giram mais e esquentam mais.
O pessoal que mexe com autorama usa o motor 130 e também caracteriza suas unidades pelas espiras. 13 espiras é o "padrão".
Esta métrica era prática para motores de escova porque o grande contribuinte para a resistência interna do motor — a escova — estava sempre lá, e não havia muita liberdade construtiva. No caso dos motores brushless, o único grande contribuinte da resistência interna é a própria bobina, que fica no estator e pode ser construída de muitas formas. Até existe uma equivalência grosseira, um motor brushless de 17.5 espiras é considerado "equivalente" ao 27 espiras de escova, mas é pouco utilizada.
Acho interessante discutir um pouco as diferenças entre o motor de escova e o brushless.
Todo motor precisa de um mecanismo de comutação ou chaveamento, interno ou externo, a fim de que seja gerado um campo magnético rotativo. No caso dos motores PMDC, a orientação desse campo ainda deve ser correspondente à posição angular do eixo. (Desse último requisito, motores a indução e de passo estão livres.)
No motor de escovas, este mecanismo é mecânico e embutido no motor. A grande vantagem é a simplicidade: basta ligar o motor numa fonte de alimentação e ele gira. As escovas limitam a durabilidade, mas um motor de boa qualidade trabalhando frio pode durar muitos anos. As outras desvantagens são a resistência elétrica das escovas e as grandes perdas por atrito.
O motor de escovas possui bobinas no rotor, então elas precisam suportar a força centrífuga, o que limita a RPM máxima. O calor gerado pelas bobinas (e pelas escovas) é difícil de remover, geralmente é por ventilação forçada.
O motor "coreless" (sem miolo) também é um motor de escovas, com o detalhe que o rotor não possui uma armadura metálica. A própria bobina é a estrutura do rotor. Isto permite que o motor seja mais leve, menor, e acelere muito rápido. Mas não pode em hipótese alguma ser forçado, pois não há armadura para absorver o calor dissipado.
O motor brushless possui bobinas no estator, portanto o calor das mesmas pode ser dissipado pela carcaça. Também não há a resistência e o atrito das escovas. A única grande desvantagem é a necessidade de um controlador externo.
O controlador ou ESC precisa ser bem "casado" com o motor brushless, principalmente no caso do motor "sensorless" sem sensor de posição do eixo, mais comum hoje em dia. Apenas três cabos de alimentação ligam controlador ao motor; a posição do eixo é determinada pela FCEM gerada nas bobinas. Por isso, o controlador precisa ser adequado ao índice Kv do motor, além de ser compatível em tensão e corrente.
Os motores brushless "sensored", como sensores Hall da posição angular do eixo, são minoria mas ainda existem. Neste caso, um cabo adicional de 6 fios conecta motor ao controlador, só para fins de deteção de posição. Neste caso o controlador não precisa ser casado com o Kv do motor; basta casar tensão e corrente, como num motor de escova. Além disso o controlador pode ser mais simples, funcionando de forma mais análoga a um comutador de escova. Por conta disso, ainda é relativamente popular caracterizar os motores "sensored" pelo número de espiras em vez do índice Kv (como foi dito antes, um motor brushless de 17.5 espiras é considerado o "padrão").
Existe também uma certa discussão sobre a natureza do motor brushless de imã permanente, conhecido na literatura por BLDC. Alguns alegam que ele é na verdade um motor síncrono de corrente alternada. De fato são parecidos. Ficam ainda mais parecidos se, em vez do indutor de corrente contínua no rotor, o motor síncrono empregar um imã permanente. Este último é conhecido pela sigla PMSM (permanent magnet synchronous motor).
Tanto motores síncronos quanto BLDC têm três cabos de alimentação. Porém o controlador BLDC alimenta apenas dois deles de cada vez, no máximo fazendo uma transição suave ("trapezoidal") entre os pares. Já o motor síncrono é alimentado por corrente alternada trifásica (continuamente pelos três cabos) e senoidal, sem variações bruscas.
O motor PMSM é mais eficiente e vibra menos, pois seu torque é constante. Por outro lado, o controlador PMSM é mais complexo e pode ser menos eficiente. Enquanto o controlador BLDC pode usar o cabo não-alimentado para detectar a posição do rotor (modo "sensorless"), o PMSM exige a presença do sensor de posição.
A construção interna dos motores BLDC e PMSM pode ser ligeiramente diferente, de modo a atingir máxima eficiência com este ou aquele tipo de alimentação.
Motores BLDC, PMSM, de indução, etc. costumam ter três grupos de bobinas, o que corresponderia a seis cabos de alimentação. Mas apenas três cabos saem do motor, e as bobinas são conectadas internamente em Y (estrela) ou em Δ (delta, triângulo). O mesmo acontece nos motores de escova: num motor de três pólos, o comutador apresenta apenas três segmentos em vez de seis, e as bobinas do rotor são interconectadas para fechar o circuito.
Seja qual for a conexão, é impossível alimentar apenas uma bobina de cada vez. Quando a corrente circula por dois cabos de alimentação, ela passa por no mínimo duas bobinas, e às vezes passa por todas as três.
Um motor conectado em Y apresenta maior impedância, maior resistência, maior torque e menor índice Kv, sempre num fator de 1,73 em relação à conexão Δ. Uma desvantagem inerente do BLDC conectado em Δ é a circulação interna de correntes parasitas, e assim a conexão Y é mais usual em BLDC. Em motores de corrente alternada trifásica, seja indução ou síncrono, ambas são boas e a maioria dos motores suporta ambas as conexões, seja para ser bivolt, seja para fazer partida estrela-triângulo.
Se um motor BLDC expõe os seis cabos de alimentação, é possível "trocar de marcha" conectando o motor em Y ou em Δ conforme a conveniência. Pelo menos eu acho que ganhar uma caixa de marchas 2:1 "de graça" é uma proposta tentadora. Já existem algumas implementações caseiras dessa ideia, aplicadas em modelos RC e também em scooters elétricos.